





PLEASE SELECT THE DESTINATION COUNTRY AND LANGUAGE :
Product Details
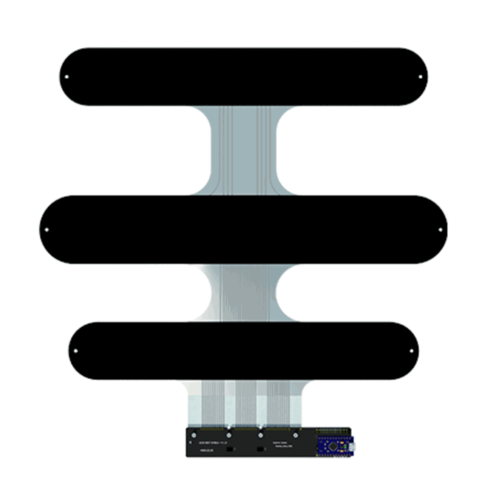
Cushion Sensor coding Kit


| Price | 66 |
|---|---|
| Discounted Price | $66.00 ($66.00 discount) |
| Discounted Amount | Total Discounted Amount KRW (Mobile Purchase Discount KRW ) |
| Reward Points |
$0(0%)
|
| Shipping Method | Parcel Service |
| Shipping Cost | International Shipping Fee |
| Description |
| Shipping | |
|---|---|
| Quantity |
|
Buy togehter
-

Seat sensor (mdxs-16-5610)
$47.14
Product Option Select Product -

아두이노용 방석 센서 쉴드
$9.43
Product Option Select Product
| Product Info | Product | Remove |
|---|---|---|
|
Total(Qty) 0
Discounted amount of your subtotal will appear when you place your orders. |
||
Please see the technical document below. And see the Arduino source code in the bottom of this page
Link2) Mirror - BOX.COM - Manual, CAD, ... (You don't need to login or signup)
Processing(https://processing.org/) - shows color map, COM(Center of Mass) gauge bar.
This SW displays 2 gauge bar. 1 for X direction(grey bar at just beneath the row 1) and 1 for Y (the most left grey bar)
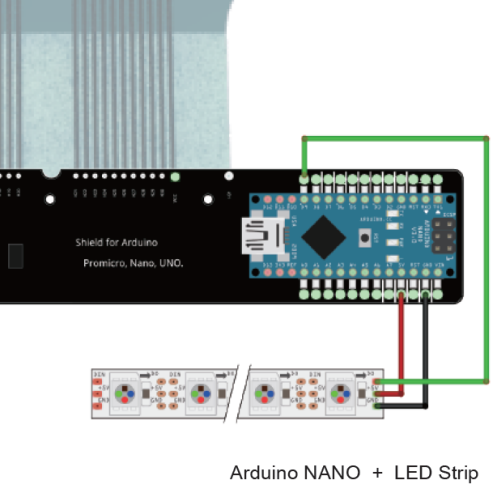
Example 1) Basic, measures sensor values and output to the serialIn case of using Arduino NANO BLE 33, replace A3 with A7 in 16th line. 경우에는 16번째 줄의 'A3'를 'A7'로 바꿔주세요.
cs
Example 2) Keyboard mapping. Making keyboard arrow key signal according to the COP (Center of Pressure)
cs
| Product | Cushion Sensor coding Kit |
|---|---|
| Manufacturer | Self-production |
| Country | Republic of Korea |
| Price | $66.00 |
| Code | P00000DX |
| Summary | Data acquisition about seated person's posture through Arduino |
| Domestic / International Shipping | oversea delivery |
| Payment for Shipping | Parcel Service |
| Shipping (Charge) | International Shipping Fee |
| 수량 |   |
Payment
Shipping
- Shipping Method : Parcel Service
- Shipping Area : A Region.
- Shipping Cost : International Shipping Fee
- Shipping Time : 3 - 5 days
- About Shipping :